
lirux
The Ray Tracer Challenge: "Computing the normal on a transformed sphere" ebook test
Hi Jamis,
I think there’s an issue with a test on chapter 6. I own the ebook, version P1.0 Feb. 2019.
This test doesn’t pass for me:
But removing the rotation_z transformation the test will pass.
I suppose that a previous errata updated the transformation matrix m but not the resulting normal vector n.
This is my normal with the rotation_z:
x: -0.4149850363522584, y: 0.8620719608670172, z: -0.29089405956569586
Hope it helps!
Marked As Solved

jdunlap
I think that I see the problem. You are applying the transformations in the wrong order. You are not rotating an ellipsoid in that test at all. Transformations are applied to a point in the opposite direction of what they appear, so in this test, the sphere is rotated and then scaled.
Perhaps this image will help to illustrate.
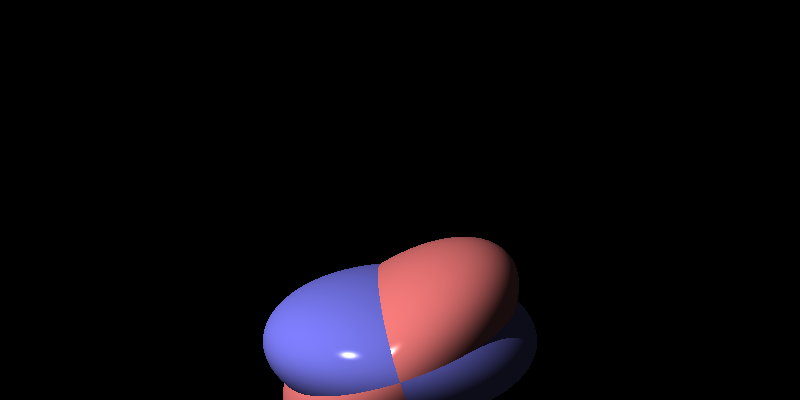
The blue ellipsoid is generated using the the order in the test (Scaling * Rotation) while the pinkish one is generated with the opposite order (Rotation * Scaling). This demonstrates that you are rotating a sphere in the test and then squishing it to an ellipsoid, not the other way around.
I agree with you that the other way would definitely rotate the normal, but I don’t believe it would in this case. Perhaps maybe Jamis intended for the second case when he made this correction, but inadvertently used this one which has no effect with or without the rotation.
Also Liked
lirux
Yes, you are right.
In my code I choose a fluent API, in witch the order of the matrix multiplications is reversed behind the scene.
So instead of using scaling(1, 0.5, 1).rotation_z(pi/5) (that equals to m = rotation_z * scaling) I should have written the opposite: rotation_z(pi/5).scaling(1, 0.5, 1).
Thank you for your help!
jdunlap
I don’t think that you’re right about this. Mine passes all tests with the z-axis rotation in. It also passes without, but that actually makes sense. First, we would rotate the original point into world space. We would then find the vector and then rotate it back to world space, causing it to point in the same direction as before. Without the rotation, we just don’t do and then undo the rotation. The rotation in this test does pretty much nothing because we already have the intersection point. It would be very different (in later chapters) when we cast a ray from world space in a direction to intersect the sphere. Then, it will make quite a bit of difference.
Please correct me if my logic is off, and I have not done the math by hand to verify all of this, but it makes logical sense to me. And my tests are passing without making any changes like you recommend.

mx00s
I ran into this too. I’m also using a fluent interface and transcribed the test wrong. Thank you both for helping me understand what’s going wrong.
It’s a bit odd that the rotation is even part of the transformation since it’s clearly a no-op when applied to the unit sphere centered on the object origin. After fixing my test transcription bug, I came up with an alternative test where each part of the transform has a meaningful impact:
Scenario: Given the normal on a transformed sphere
Given s <- sphere()
And m <- scaling(1, 0.5, 1) * shearing(1, 0, 0, 0, 0, 0)
And set_transform(s, m)
When n <- normal_at(s, point(0, sqrt(2)/2, sqrt(2)/2))
Then n = vector(-0.24077171, 0.96308684, -0.120385855)
But beware, I have not verified the computation beyond using my implementation to get the normal vector. Also, note if you’re using a fluent interface for your transforms, the identity should be followed by shearing.
Popular Pragmatic Bookshelf topics







Other popular topics





Categories:
Sub Categories:
Popular Portals
- /elixir
- /rust
- /wasm
- /ruby
- /erlang
- /phoenix
- /keyboards
- /python
- /js
- /rails
- /security
- /go
- /swift
- /vim
- /java
- /clojure
- /emacs
- /haskell
- /typescript
- /svelte
- /onivim
- /kotlin
- /c-plus-plus
- /crystal
- /tailwind
- /react
- /gleam
- /ocaml
- /elm
- /flutter
- /vscode
- /html
- /ash
- /deepseek
- /zig
- /opensuse
- /centos
- /php
- /scala
- /react-native
- /lisp
- /sublime-text
- /textmate
- /nixos
- /debian
- /agda
- /deno
- /django
- /kubuntu
- /arch-linux
- /nodejs
- /spring
- /ubuntu
- /revery
- /manjaro
- /julia
- /lua
- /diversity
- /quarkus
- /markdown
Devtalk Sponsors
Practical resources that improve the lives of professional developers.

We build trusted fault-tolerant systems that scale to billions of users.

Real-time error tracking, performance insights, and observability for devs.
Supporting innovation across the BEAM ecosystem.

We build reliable cloud platforms for business-critical systems.

Develop your skills with books, videos, and courses.

Catch errors, track performance, monitor hosts and more.

Enabling companies to succeed by building software people love.

Courses that move you from confusion to "Aha, now I get it!"
Publishing Linux Magazine, ADMIN, and MakerSpace for 25+ years.